# 架构
# 架构图
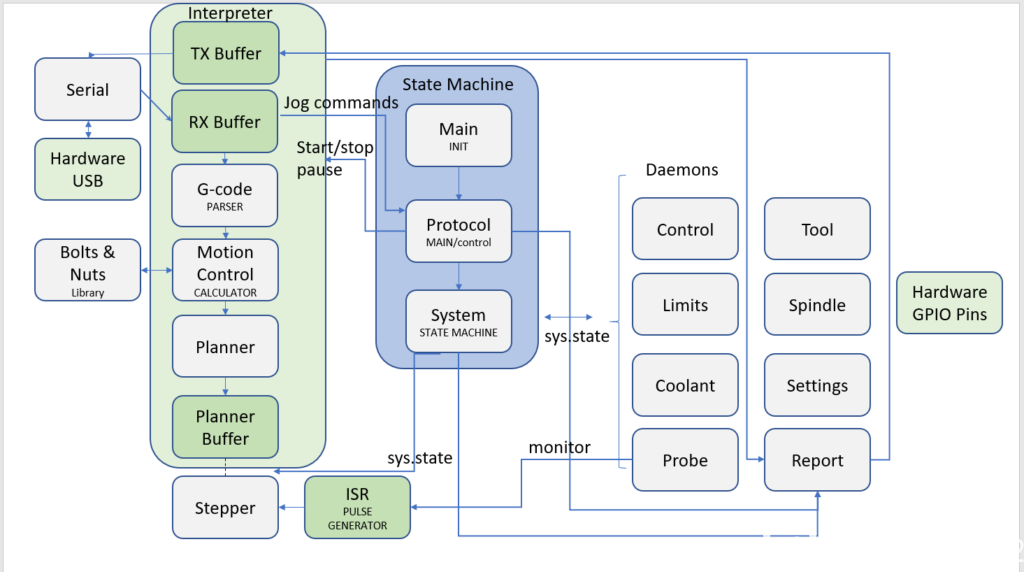
Grbl的核心是带有梯形加减速过程的直线插补算法的实现,它包含一个G代码的解析器,一个全局状态机,还有一系列的守护进程,是一个典型的前台+后台架构。前台是各种中断处理,后台是一个无限循环,然后通过状态机关联前后台,中断中不会执行复杂的任务,它只根据当前条件改变状态,后台通过状态执行相应的任务,比如G代码解析,运动前瞻规划,运动插值等。通过调用链分析,得到下图:
Grbl运行在 Arduino UNO 硬件上,但是它并没有使用Arduino框架,原因在于Arduino的芯片atmega328p资源有限,而且Arduino框架占用了某些资源(比如定时器)。因此grbl所有的库都是自己封装的,通过操作寄存器实现的。通过grbl源码,我整理出了以下模块的作用:
# 入口
main.c 初始化外设,开启主循环
# 串口通信
serial.c:低阶串口通信并为异步控制检出运行时的实时命令。
report.c:通知状态映射和消息组装
print.c:打印不同格式字符串的函数(用在串口)
# 主循环
protocol.c: 从串口接受命令行并把他们传递到“gcode”执行。提供每个命令的状态响应。还管理串口中断的运行时命令集。
gcode.c:从“protocol”接收g代码,按照解析器的当前状态解析它并且通过“xxx_control”模块发出命令
# 运动规划模块
motion_control.c: 从“gcode”接收移动命令并且传递他们到规划器。这个模块为规划器模块或步进电机模块提供公共接口。
planner.c: 从“motion_control”接收线性移动命令并且把他们添加到准备移动的计划中。它维护持被添加的移动续优化加速度路径。
# 动作模块
stepper.c:按计划用步进电机按步执行移动
spindle.c: 控制主轴的命令
coolant_control.c:控制主轴冷却的命令
# 输入控制模块
limits.c:配置限位开关,用来告诉机器源点位置,阻止超出行程范围
probe.c:对刀,告知Z轴0点位置
jog.c:手动控制机器移动
system.c:解析并执行系统命令($开头),外部控制按钮响应
# 参数设置模块
settings.c:在eeroom中维护运行时配置项并且让它对所有模块可用
config.h:编译时的用户配置
eeprom.c:一个Atmel的库,提供方法读或写eerom,添加了一点东西可以在读写二进制流的时候检查配置项的校验和。
# 引脚映射模块
cpu_map.h:定义MCU的引脚对应关系
# 辅助模块
nuts_bolts.c:一些全局变量定义,到处被用到的有用的常量、宏。